Fark Denklemleri (Difference Equations)
Sürekli zamanlı sistemleri diferansiyel denklemlerle modellediğimiz gibi, ayrık zamanlı sistemleri de Fark Denklemleri ile modelleriz. Bu konu, DSP'nin en "matematiksel" kısmıdır ve filtre tasarımının (IIR/FIR) temelini oluşturur.
Tanım ve LCCDE Yapısı
Bir sistemin çıkışı ($y[n]$); geçmiş çıkış değerlerine ve o anki/geçmiş giriş değerlerine bağlıysa, bu ilişki bir fark denklemi ile gösterilir.
Doğrusal Sabit Katsayılı Fark Denklemi (LCCDE): En genel form şöyledir:
$$ \sum_{k=0}^{N} a_k y[n-k] = \sum_{k=0}^{M} b_k x[n-k] $$
Burada:
- $y[n-k]$ terimleri Geri Beslemeyi (Feedback) temsil eder.
- $a_k$ ve $b_k$ sistemin sabit katsayılarıdır.
- Genellikle $a_0 = 1$ kabul edilir (veya denklemin tamamı $a_0$'a bölünür).
Çözüm Yöntemi (Klasik Yöntem)
Diferansiyel denklemlerle neredeyse aynı mantıkla, 3 aşamada çözülür:
Toplam Çözüm = Homojen Çözüm + Özel Çözüm
$$y[n] = y_h[n] + y_p[n]$$
Adım 1: Homojen Çözüm ($y_h[n]$)
Sistemin dışarıdan bir giriş olmadığında ($x[n]=0$) kendi doğası gereği nasıl davrandığını (sönümleme vb.) gösterir.
- Denklemdeki giriş terimlerini ($x$) sıfıra eşitle.
- $y[n]$ yerine $r^n$ koyarak Karakteristik Denklemi oluştur.
- Bu polinomun köklerini ($r_1, r_2, \dots$) bul.
Çözüm Formatı:
$$y_h[n] = c_1 (r_1)^n + c_2 (r_2)^n + \dots$$
Kritik Sınav Bilgisi
Eğer kökler çakışıksa (katlı kök varsa, örn: $r_1=r_2=0.5$), ikinci kökü birbirinden ayırmak için $n$ ile çarparız: $$y_h[n] = c_1 (0.5)^n + c_2 \cdot n \cdot (0.5)^n$$
Adım 2: Özel Çözüm ($y_p[n]$)
Sistemin uygulanan girişe ($x[n]$) uyum sağlamak için ürettiği cevaptır. Giriş sinyalinin formuna "benzeyen" bir çözüm tahmin edilir.
Giriş Sinyaline Göre Tahmin Tablosu:
| Giriş Sinyali ($x[n]$) | Tahmin Edilen Özel Çözüm ($y_p[n]$) |
|---|---|
| Sabit ($A$ veya $A u[n]$) | $K$ (Sabit Sayı) |
| Üstel ($A \alpha^n$) | $K \alpha^n$ |
| Sinüzoidal ($A \cos(\omega_0 n)$) | $K_1 \cos(\omega_0 n) + K_2 \sin(\omega_0 n)$ |
| Rampa ($A n$) | $K_1 n + K_0$ |
Öğrenci Notu
Eğer giriş sinyalinin kökü, homojen çözümün köküyle aynıysa (çakışma varsa), sistem "rezonansa" girer. Bu durumda tablodaki tahmininizi $n$ ile çarpmanız gerekir. (Örn: $K \cdot n \cdot \alpha^n$).
Adım 3: Toplam Çözüm ve Katsayıların Bulunması
$$y[n] = y_h[n] + y_p[n]$$
Denklemde hala bilinmeyen $c_1, c_2$ gibi katsayılar var. Bunları bulmak için Başlangıç Koşulları ($y[-1]$ vb.) kullanılır.
Dikkat: Başlangıç koşullarını doğrudan $y_h$ formülüne yazamazsınız! Önce toplam çözüm denkleminde $n=0, n=1$ gibi değerler için sistemin o anki çıkışını yinelemeli olarak hesaplayıp, sonra katsayıları bulmalısınız.
Örnek Soru ve Adım Adım Çözüm
Soru: $y[n] - 0.5y[n-1] = x[n]$ fark denklemi veriliyor. Giriş $x[n] = u[n]$ (Birim basamak) ve başlangıç koşulu $y[-1] = 0$ ise sistemin cevabını ($n \ge 0$ için) bulunuz.
Çözüm:
1. Homojen Çözüm:
- Girişi sıfırla: $y[n] - 0.5y[n-1] = 0$
- Karakteristik denklem ($y[n] \to r^n$): $r^n - 0.5r^{n-1} = 0 \implies r - 0.5 = 0$
- Kök: $r = 0.5$
- $$y_h[n] = c \cdot (0.5)^n$$
2. Özel Çözüm:
- Giriş $x[n] = u[n]$ (yani $n \ge 0$ için sabit 1).
- Tahmin: $y_p[n] = K$ (Sabit bir sayı).
- Denklemde yerine koy: $$K - 0.5K = 1$$ $$0.5K = 1 \implies K = 2$$
- $$y_p[n] = 2$$
3. Toplam Çözüm:
$$y[n] = c \cdot (0.5)^n + 2$$
4. Katsayıyı ($c$) Bulma:
Bize $y[-1]=0$ verilmiş ama denklemimiz $n \ge 0$ için kurulu. Önce $n=0$ anındaki gerçek çıkışı ana denklemden manuel bulalım:
- Ana denklem: $y[0] - 0.5y[-1] = x[0]$
- $y[0] - 0.5(0) = 1$ (Çünkü $u[0]=1$)
- Buradan: $y[0] = 1$ olduğunu bulduk.
Şimdi toplam çözümde $n=0$ yazıp eşitleyelim: $$y[0] = c \cdot (0.5)^0 + 2 = 1$$ $$c + 2 = 1 \implies c = -1$$
Sonuç: $$y[n] = 2 - (0.5)^n \quad \text{, } n \ge 0$$
Sistem Türleri: FIR ve IIR Karşılaştırması
Fark denklemlerinin yapısına göre filtreler ikiye ayrılır. Bu ayrım vize/finalde sözlü soru olarak gelebilir.
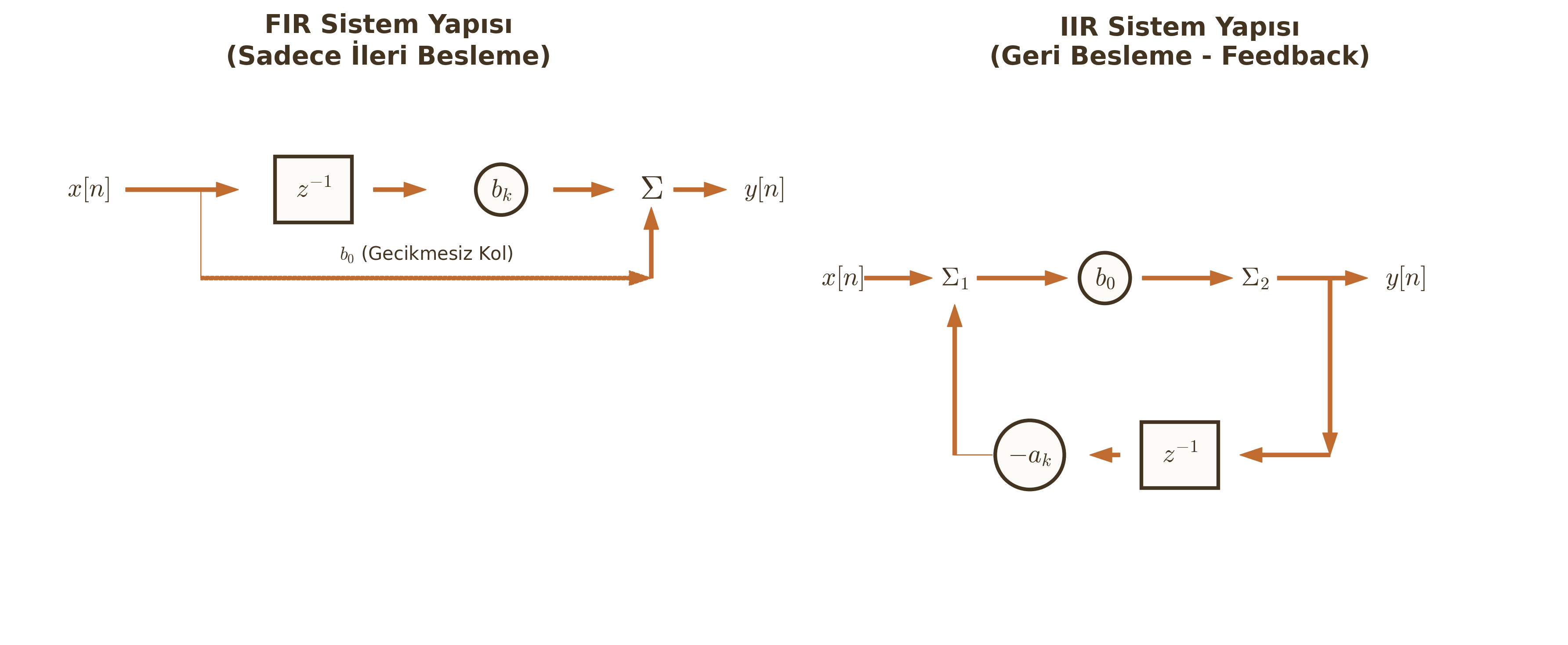
1. FIR (Finite Impulse Response - Sonlu Dürtü Cevabı)
Sadece girişlerin ($x[n], x[n-1]$) kullanıldığı sistemlerdir. Geri besleme yoktur.
- Denklem: $y[n] = \sum b_k x[n-k]$
- Özellik: $y[n-k]$ terimi içermez.
- Avantaj: Her zaman kararlıdır (Stability garantidir).
2. IIR (Infinite Impulse Response - Sonsuz Dürtü Cevabı)
Çıkışın hesaplanması için geçmiş çıkış değerlerinin ($y[n-1]$) de kullanıldığı sistemlerdir.
- Denklem: $y[n] - \sum a_k y[n-k] = \sum b_k x[n-k]$
- Özellik: Geri besleme (feedback) vardır. Dürtü cevabı sonsuza kadar gider.
- Risk: Kökler birim çemberin dışına çıkarsa sistem kararsızlaşabilir (Patlayabilir).